
![]() Wyświetl kod źródłowy na GitHubie
Wyświetl kod źródłowy na GitHubie

OpenThread jest niezależny od systemu operacyjnego i platformy, a jego interfejs abstrakcyjny jest ograniczony (PAL). Ten profil określa:
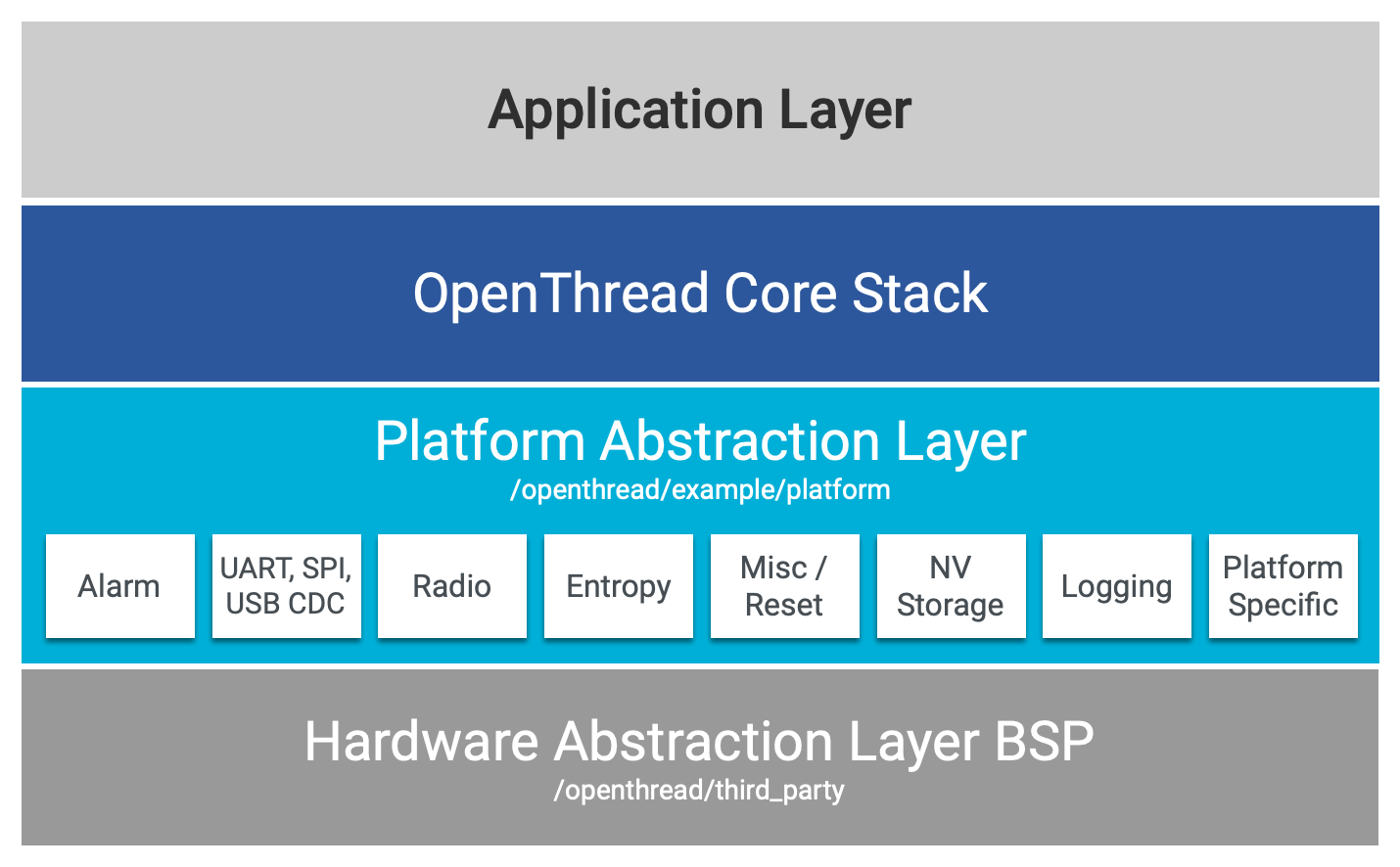
- Interfejs alarmu dla minutnika z alarmem
- interfejsy magistrali (UART, SPI) do przesyłania komunikatów CLI i Spinel;
- Interfejs radiowy do komunikacji IEEE 802.15.4-2006
- Procedury inicjowania specyficzne dla GCC
- Entropia do generowania prawdziwych liczb losowych
- Usługa ustawień do przechowywania konfiguracji w pamięci trwałej
- Interfejs logowania do przesyłania komunikatów logowania OpenThread
- Procedury inicjowania specyficzne dla systemu
Wszystkie interfejsy API powinny być implementowane na podstawie pakietu Build Support Package (BSP) na poziomie warstwy abstrakcji sprzętowej (HAL).
Pliki interfejsu API należy umieszczać w tych katalogach:
| Typ | Katalog |
|---|---|
| Implementacja PAL na poszczególnych platformach | /openthread/examples/platforms/platform-name |
| Pliki nagłówka – interfejs API nieulotnego magazynu danych | /openthread/examples/platforms/utils |
| Wszystkie inne pliki nagłówka | /openthread/include/openthread/platform |
| HAL BSP | /openthread/third_party/platform-name |
Alarm
Deklaracja interfejsu API:
/openthread/include/openthread/platform/alarm-milli.h
Interfejs Alarm API zapewnia podstawowe usługi dotyczące ustawiania czasu i alarmów dla implementacji zegara na wyższym poziomie.
Istnieją 2 rodzaje alarmów: milisekundowy i mikrosekundowy. Millisecond jest wymagany na nowej platformie sprzętowej. Mikrosekunda jest opcjonalna.
UART
Deklaracja interfejsu API:
/openthread/examples/platforms/utils/uart.h
Interfejs UART API implementuje podstawową komunikację przez port szeregowy za pomocą interfejsu UART.
Dodatki OpenThread CLI i NCP są zależne od interfejsu UART, który umożliwia interakcję z hostem. Obsługa interfejsu UART jest opcjonalna. Nawet jeśli nie planujesz używać tych dodatków na nowej platformie sprzętowej, zdecydowanie zalecamy dodanie obsługi z kilku powodów:
- Wiersz poleceń jest przydatny do sprawdzania, czy port działa prawidłowo.
- Narzędzie automatyzacji Harness używa interfejsu UART do sterowania OpenThread na potrzeby testowania i certyfikacji.
Jeśli docelowa platforma sprzętowa obsługuje moduł USB CDC, a nie UART, pamiętaj o tym, aby:
- Zainstaluj odpowiedni sterownik CDC USB po stronie hosta
- Zastąp implementację interfejsu UART interfejsem sterownika USB CDC (wraz z BSP) po stronie OpenThread, używając tych samych prototypów funkcji.
Radio
Deklaracja interfejsu API:
/openthread/include/openthread/platform/radio.h
Interfejs Radio API definiuje wszystkie niezbędne funkcje wywoływane przez wyższą warstwę MAC IEEE 802.15.4. Układ radiowy musi być w pełni zgodny ze specyfikacją IEEE 802.15.4-2006 dla częstotliwości 2,4 GHz.
Ze względu na funkcję zwiększonego zużycia energii OpenThread wymaga, aby wszystkie platformy domyślnie implementowały automatyczne oczekujące ramki (transmisja pośrednia), a tabela dopasowania adresów źródłowych powinna być również zaimplementowana w pliku źródłowym radio.h.
Jeśli jednak nowa platforma sprzętowa jest ograniczona pod względem zasobów, tabela adresów źródłowych może być zdefiniowana jako tabela o długości 0. Więcej informacji znajdziesz w artykule Auto Frame Pending.
Inne/Reset
Deklaracja interfejsu API:
/openthread/include/openthread/platform/misc.h
Interfejs Misc/Reset API udostępnia metodę resetowania oprogramowania na chipie oraz umożliwia wysłanie zapytania o przyczynę ostatniego zresetowania.
Entropia
Deklaracja interfejsu API:
/openthread/include/openthread/platform/entropy.h
Interfejs Entropy API udostępnia prawdziwy generator liczb losowych (TRNG) dla warstwy wyższej, który służy do utrzymywania zasobów bezpieczeństwa w całej sieci OpenThread. Interfejs API powinien gwarantować, że nowe losowe liczby są generowane dla każdego wywołania funkcji. Zasoby zabezpieczeń, na które wpływa TRNG:
- AES CCM nonce
- Losowe opóźnienie
- Rozszerzony adres urządzeń
- Początkowy losowy okres w timerze ścieżki
- Identyfikatory tokenów/wiadomości CoAP
Pamiętaj, że wiele platform ma już zintegrowany generator liczb losowych, który udostępnia interfejs API w pakiecie BSP. Jeśli docelowa platforma sprzętowa nie obsługuje TRNG, rozważ użycie próbkowania modułu ADC do generowania liczb losowych o stałyej długości. W razie potrzeby wypróbuj kilka iteracji, aby spełnić wymagania dotyczące TRNG (uint32_t).
Gdy makro MBEDTLS_ENTROPY_HARDWARE_ALT ma wartość 1, ten interfejs API powinien też udostępniać metodę generowania entropii sprzętowej używanej w bibliotece mbedTLS.
Pamięć nieulotna
Deklaracje interfejsu API:
/openthread/include/openthread/platform/flash.h
lub
/openthread/include/openthread/platform/settings.h
Wymaganie dotyczące pamięci trwałej można spełnić, wdrażając jeden z 2 wymienionych powyżej interfejsów API. Interfejs Flash API implementuje sterownik pamięci flash, a interfejs Settings API udostępnia funkcje dla implementacji operacji flash w warstwie wyższej.
Te interfejsy API udostępniają warstwie wyższej:
- Dostępny rozmiar pamięci trwałej używanej do przechowywania danych aplikacji (np. aktywnego lub oczekującego zbioru danych operacyjnych, bieżących parametrów sieci i danych logowania urządzeń wątku do ponownego dołączenia po resecie).
- operacje odczytu, zapisu, kasowania i zapytań dotyczących stanu pamięci flash;
W pliku konfiguracji platformy przykładowej użyj interfejsu OPENTHREAD_CONFIG_PLATFORM_FLASH_API_ENABLE, aby wskazać, którego interfejsu API ma używać platforma. Jeśli ustawisz wartość 1, musisz zaimplementować interfejs Flash API. W przeciwnym razie musisz zaimplementować interfejs API ustawień.
Ten parametr musi być ustawiony w pliku /openthread/examples/platforms/platform-name/openthread-core-platform-name-config.h.
Logowanie
Deklaracja interfejsu API:
/openthread/include/openthread/platform/logging.h
Interfejs Logging API implementuje funkcje rejestrowania i debugowania OpenThread, oferując wiele poziomów wyjścia debugowania. Ten interfejs API jest opcjonalny, jeśli nie planujesz korzystać z logowania OpenThread na nowej platformie sprzętowej.
Najwyższy i najbardziej szczegółowy poziom to OPENTHREAD_LOG_LEVEL_DEBG, który drukuje wszystkie informacje o nieprzetworzonych pakietach i rejestruje wiersze przez port szeregowy lub na terminalu. Wybierz poziom debugowania, który najlepiej odpowiada Twoim potrzebom.
Specyficzne dla systemu
Deklaracja interfejsu API:
/openthread/examples/platforms/openthread-system.h
Interfejs API dla systemu zapewnia głównie operacje inicjalizacji i dezinicjalizacji na wybranej platformie sprzętowej. Biblioteka OpenThread nie wywołuje tego interfejsu API, ale może być przydatna dla systemu lub RTOS. W tym pliku źródłowym możesz też zaimplementować inicjalizację innych modułów (np. UART, Radio, Random, Misc/Reset).
Implementacja tego interfejsu API zależy od przypadku użycia. Jeśli chcesz użyć wygenerowanych aplikacji interfejsu wiersza poleceń i NCP na danej platformie, musisz zaimplementować ten interfejs API. W przeciwnym razie można zaimplementować dowolny interfejs API, aby zintegrować przykładowe sterowniki platformy z systemem lub RTOS.