
ก่อนดำเนินการต่อ เราขอแนะนำให้คุณทำตามCodelab ฮาร์ดแวร์ OpenThread ซึ่งจะอธิบายรายละเอียดวิธีตั้งค่า สภาพแวดล้อมและติดตั้งเครื่องมือและซอฟต์แวร์ทั้งหมดที่จำเป็นในการแฟลชบอร์ด nRF52840 DK ที่ใช้ในคู่มือนี้
สร้าง OpenThread
- โคลนที่เก็บ OpenThread แล้วเปลี่ยนไปใช้คอมมิตรีลีส Thread Reference
2018-09-26
git clone https://github.com/openthread/openthreadcd openthreadgit checkout -b thread-reference-20180926 - ติดตั้งชุดเครื่องมือ GNU และการอ้างอิงอื่นๆ
./script/bootstrap - สร้างตัวอย่าง nRF52840 สวิตช์
USB=1จะเปิดใช้ USB CDC ACM เนทีฟ เป็นการรับส่งแบบอนุกรมmake -f examples/Makefile-nRF52840 BORDER_AGENT=1 BORDER_ROUTER=1 COMMISSIONER=1 \ DHCP6_CLIENT=1 DHCP6_SERVER=1 JOINER=1 MAC_FILTER=1 REFERENCE_DEVICE=1 \ UDP_FORWARD=1 USB=1
แฟลชและเชื่อมต่อ NCP
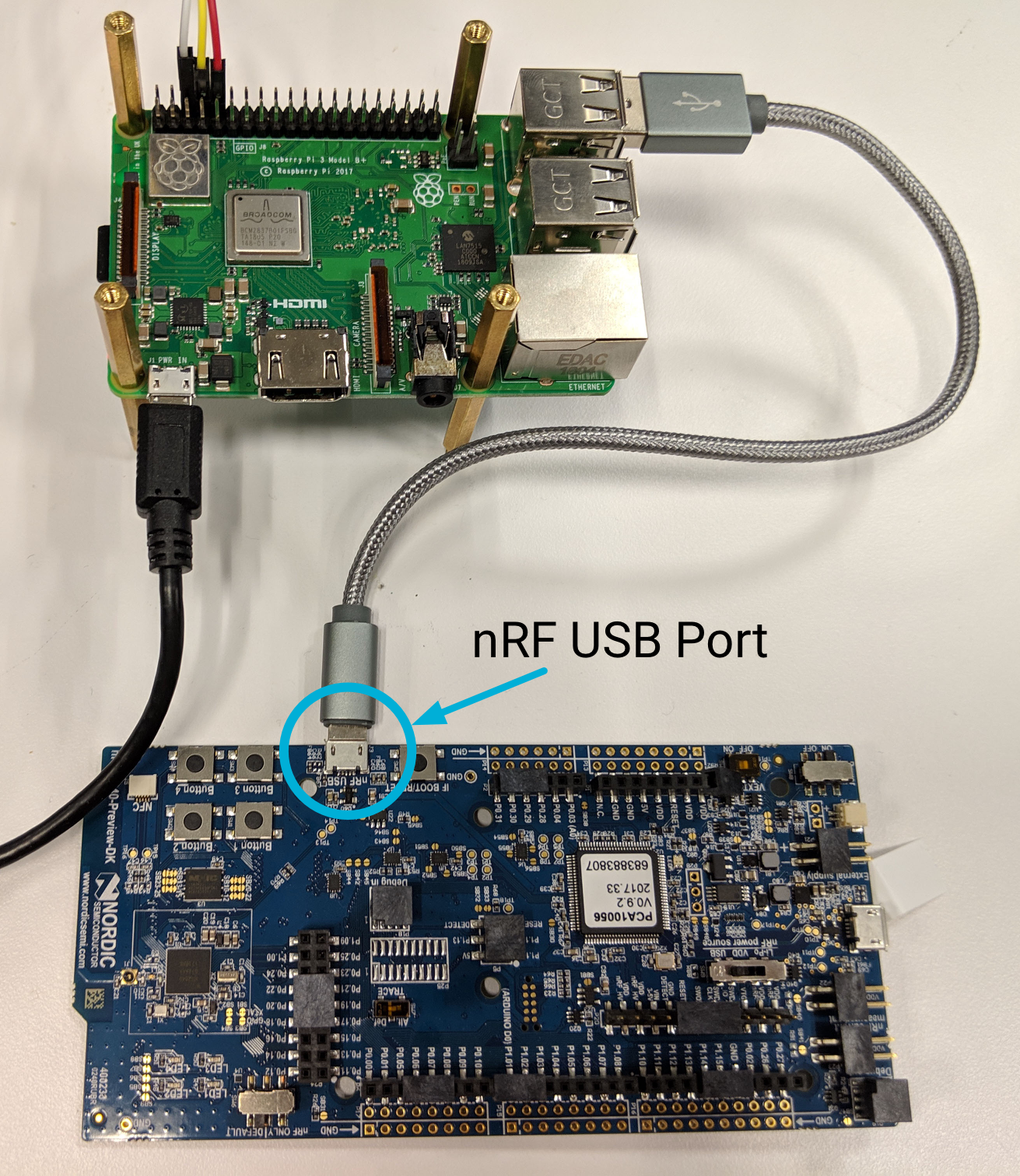
ดูขั้นตอนแฟลช nRF52840 และ เชื่อมต่อ nRF52840 จาก คู่มือเฟิร์มแวร์ NCP ที่สร้างไว้ล่วงหน้าเพื่อดูวิธีการแฟลชบอร์ด nRF52840 DK เป็น NCP และเชื่อมต่อกับ Raspberry Pi
คุณยังดูวิธีการที่คล้ายกันได้ใน Codelab ฮาร์ดแวร์ OpenThread
ตั้งค่า Raspberry Pi
ดูขั้นตอนการดาวน์โหลดและติดตั้งระบบปฏิบัติการจากหน้าแพลตฟอร์มเราเตอร์ชายแดน Raspberry Pi 3B (RPi3B) เพื่อดูวิธีการ ติดตั้งระบบปฏิบัติการและกำหนดค่าอุปกรณ์
นอกเหนือจากการตั้งค่าและกำหนดค่า RPi3B ตามปกติแล้ว ให้ติดตั้ง git และ
ยูทิลิตีที่แนะนำบางอย่าง
sudo apt-get install git screen tcpdumpตั้งค่า OpenThread Border Router
- โคลนที่เก็บ OpenThread Border Router แล้วเปลี่ยนไปใช้คอมมิตเวอร์ชัน Thread
Certified 2018-08-19
git clone https://github.com/openthread/ot-br-posixcd ot-br-posixgit checkout -b thread-br-certified-20180819 - ติดตั้งการอ้างอิงด้วยคำสั่งต่อไปนี้
./script/bootstrap - คอมไพล์และติดตั้ง OTBR และ
wpantundโดยใช้คอมมิตการรับรอง OTBR สำหรับwpantund:WPANTUND_COMMIT=8c189c6 ./script/setup - เปิด
/etc/wpantund.confแล้วอัปเดตพอร์ต UART สำหรับ nRF52840 DK NCP โดยทำดังนี้Config:NCP:SocketPath '/dev/ttyACM0'
- รีสตาร์ทบริการ
wpantundโดยทำดังนี้sudo service wpantund restart
ตอนนี้ Border Router ควรพร้อมใช้งานแล้ว ดูข้อมูลเพิ่มเติมเกี่ยวกับ OTBR ได้ที่OpenThread Border Router